.jpg)
.jpg)
.jpg)
2,964,000 تومان
در حال حاضر موجود نمی باشد
علاقه مندان : 5 نفر
وضعیت : فعال
تعداد مرجوعی : 0
دنبال کنندگان : 6 نفر
قدمت : 10 سال و 3 ماه و 15 روز
وزن : 800 گرم
کل فروش : 27 عدد
تعداد سفارش ها : 27 سفارش
4 از 5.0 با 7 رای
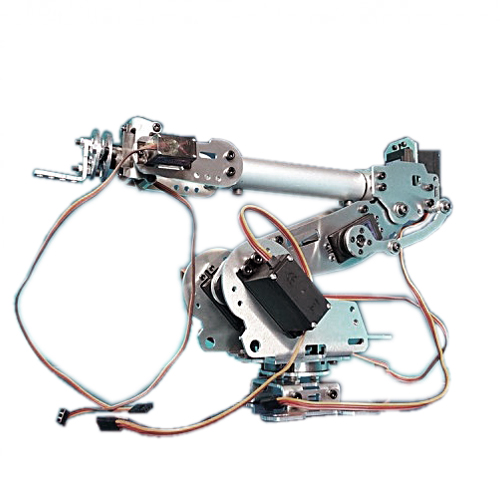
ربات بازوی صنعتی تمام فلزی 6 محوره - دارای 7 سروو موتور
بازوی رباتیک WZYJTM-ARM یک بازوی مکانیکی با قابلیت برنامهریزی می باشد که کاربردهایی شبیه به دست انسان دارد. در واقع تعریف سادهای که از بازوی رباتیک میتوان داشت، ماشینی است که توانایی انجام آنچه را انسان با دست خود انجام میدهد داشته باشد. امروزه بسیاری از تولیدکنندگان تمایل به مکانیزه کردن خطوط تولیدی سنتی خود دارند. سرعت و دقت بالای ربات ها به نسبت انسان ها بویژه در کارهای تکراری، از عواملی است که تولیدکنندگان را به این سمت هدایت کرده است. تعداد حرکات مستقل مفاصل و اتصالات ربات که در آن عملگر نهایی میتواند حرکت نماید و درجات آزادی توسط تعدادی محور حرکتی از ویژگی های انتخاب بازوهای رباتیک می باشد.یک سرو موتور، ماهیچهی یک سیستم کنترلی است. این ماهیچه، متناسب با کاربردهای مختلف، نیروی لازم برای به حرکت درآوردن بازو را فراهم میکند. خیلی از افراد فکر میکنند که سروو یک وسیلهای است که به صورت مجزا به کار برده میشود. اما، یک سروو موتور نمیتواند بهتنهایی و بدون یک مجموعهای از وسایل که برای رسیدن به هدفی مشخص درکنار هم قرار گرفتهاند،استفاده شود. در كل بازو 5 دنده فرمان فلزی MG996R و 2 دنده فرمان فلزی MG90S به کار رفته است و همین امر سبب افزایش کارایی و طول عمر بیشتر این بازوی رباتی شده است. این بازوی رباتیک دارای 6 محوراست.
کاربرد بازوی رباتیک صنعتی 6 محوره:
- آموزشی
- رباتیک
- صنعتی
مشخصات ربات بازوی صنعتی تمام فلزی 6 محوره:
- جنس: آلیاژ آلومینیوم
- تعداد محور: 6
- مونتاژ: حرکت 6 asix کاملاً کاربردی
- با برنامه نویسی می توانید بازوی مکانیکی را کنترل کنید.
- وزن: 840 گرم
- مشخصات سروو MG996R:
- طول سیم رابط: 300 میلی متر
- ابعاد: 54 × 38 × 20 میلی متر
- نوع چرخ دنده: چرخ دنده تمام فلزی
- سرعت عملکرد: 0.17 ثانیه / 60 درجه (4.8 ولت بدون بار)
- سرعت عملکرد: 0.13 ثانیه / 60 درجه (6.0 ولت بدون بار)
- گشتاور استال: 12 کیلوگرم بر سانتی متر (6 ولت)
- ولتاژ عملیاتی: 4.8 - 7.2 ولت
- محدوده دما: 0 تا 5 درجه سانتی گراد
- سازگار با اکثر کانکتورهای گیرنده استاندارد: Futaba، Hitec، Sanwa، GWS و غیره. توضیحات سرو MG90S:
- توضیحات سرو MG90S:
- ابعاد: 22.8mm x 12.2mm x 28.5mm
- گشتاور استال: 1.8 کیلوگرم در سانتی متر (4.8 ولت) 2.2 کیلوگرم / سانتی متر (6 ولت)
- محدوده دما: 0 درجه تا 55 درجه
- سرعت عملیاتی: 0.1 ثانیه / 60 درجه (4.8 ولت)
- 0.08 ثانیه/60 درجه (6 ولت)
- پهنای باند مرده: 5 ثانیه
- ولتاژ عملیاتی: 4.8 - 6 ولت
- نوع موتور: موتور بدون هسته
- نوع دنده: دنده تمام فلزی
مستندات:
فایل اسمبلی ربات بازوی صنعتی WZYJTM-ARM
Description:
6 DOF robotic arm includes (waist, arm, arm, arm rotation, wrist, wrist rotation), which are all-metal robot arm with bottom joint high quality all made by steel big bearing fixing. It provides an attractive and durable structure. The arms are substantially standard size and will be very small movable batches of
different sizes. The length of the robot arm is not as long as possible. The longer, the greater the load on the steering gear, which directly affects the life of the steering gear. The excessive load will burn the steering gear circuit and damage the steering gear. The performance of the robotic arm has a direct effect. The longer the robotic arm, the smaller the force, and the smaller the load. The mechanical arm calculates the best size according to the gear load and the circuit load of the general-purpose metal steering gear and exerts the best performance of the steering gear. The arm base is fixed with high-quality all-steel large bearings, and the base is fixed. The movement of the arm is no longer shaking, and the load-bearing performance is better. The bottom joint is driven by 2 servos, the force is doubled, and the 2 servos are more stable than the single servo drive.
features:
1. The design concept of this baby comes from ABB palletizing robot, the principal structure is the same, the range of motion is greater than other arms of the same level.
2. The material of the frame is made of thickened and hard aluminum alloy CNC.
Do not compare the materials of other stores with different material thicknesses.
3. The whole arm adopts 5 MG996R metal gear steering gears and 2 MG90S metal gear steering gears. The bottom joint is driven by two servos, which is twice as powerful. The two servos are more stable than the single servo.
4. All sports joints use high-quality bearing links for better performance.
5. The main control board fixed base is added behind the arm, which is more convenient and beautiful with the movement of the mechanical arm.
6. The volume and accuracy of the baby's design are particularly suitable for teaching and experimentation.
7. The arm base is fixed with high-quality all-steel large bearings, and the
movement of the arm fixed by the base is no longer shaking, and the load-bearing performance is better.
8. The product comes standard with a fixture fixed disc, users can continue to the DIY suction cup, electromagnet, fork, claw, gripper, etc. according to the characteristics of raw materials.
Note: all packages are delivered in parts, and users need to assemble and debug
themselves (provide assembly instructions).
Application:
educational
robotic
industrial
Specifications:
Material: aluminum alloy
Number of axles: 6
Assembly: Fully functional 6 asix movement
You can control the mechanical arm by programming.
Weight: 840 grams
MG996R servo specifications:
Length of connecting wire: 300 mm
Dimensions: 54 x 38 x 20 mm
Type of gear: full metal gear
Operating speed: 0.17 seconds / 60 degrees (4.8V no load)
Operating speed: 0.13 seconds / 60 degrees (6.0V no load)
Stall torque: 12 kg/cm (6 V)
Operating voltage: 4.8 - 7.2 V
Temperature range: 0 to 5 degrees Celsius
Compatible with most standard receiver connectors: Futaba, Hitec, Sanwa, GWS, etc. MG90S servo description:
MG90S servo description:
Dimensions: 22.8mm x 12.2mm x 28.5mm
Stall torque: 1.8 kg/cm (4.8 V) 2.2 kg/cm (6 V)
Temperature range: 0 degrees to 55 degrees
Operating speed: 0.1 seconds / 60 degrees (4.8V)
0.08 seconds/60 degrees (6V)
Dead bandwidth: 5 seconds
Operating voltage: 4.8 - 6 volts
Motor Type: Coreless Motor
Gear type: All metal gear