





811,230 تومان
در حال حاضر موجود نمی باشد
موجودی در حال ارسال به انبار
-
250 عدد1404/11/16
علاقه مندان : 14 نفر
وضعیت : فعال
تعداد مرجوعی : 0
دنبال کنندگان : 18 نفر
قدمت : 12 سال و 5 ماه و 7 روز
وزن : 363 گرم
کل فروش : 2177 عدد
تعداد سفارش ها : 260 سفارش
3 از 5.0 با 15 رای
استپر موتور 42BYGH47 -401A نما Nema 17 - استپر موتور پرینتر سه بعدی
استپر موتور 42BYGH47 -401A یک موتور پلهای دو قطبی (Bipolar) با جریان نامی 1.5 آمپر است که برای کاربردهای دقیق در حوزه کنترل موقعیت و سرعت طراحی شده است. در این استپر موتور 1.5 آمپر 42BYGH47 نما Nema 17 بوده و هر دور کامل آن به 200 مرحله مساوی تقسیم شده که معادل 1.8 درجه در هر پله است. این ویژگی باعث میشود بتوان موقعیت محور موتور را بدون نیاز به سیستم فیدبک به صورت حلقهباز با دقت بالا کنترل کرد. قطر شافت این موتور 5 میلیمتر و گشتاور نگهدارنده آن برابر با 55 نیوتنسانتیمتر است که برای حرکتهای دقیق و پایدار در دستگاههایی مانند پرینترهای سه بعدی بسیار مناسب است.
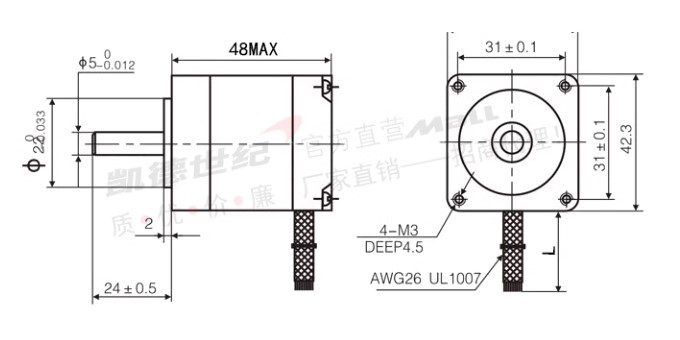
ابعاد فریم این استپر موتور پرینتر سه بعدی 42x42 میلیمتر و طول بدنه آن 48 میلیمتر میباشد. این موتور دارای چهار سیم اتصال با رنگهای مشکی (A+)، سبز (A-)، قرمز (B+) و آبی (B-) است که امکان اتصال به درایورهای استاندارد دو فاز را فراهم میکند. استپر موتورهای دو فاز مانند این مدل، به دلیل ساختار الکترومغناطیسی خاص خود، توانایی تولید گشتاور بالا در سرعتهای پایین را دارند و برای کاربردهای صنعتی و دقیق انتخاب مناسبی محسوب میشوند.
کاربرد اصلی این استپر موتور 42BYGH47 در دستگاههای نیازمند کنترل موقعیت دقیق مانند پرینترهای سه بعدی، دستگاههای CNC، رباتیک و تجهیزات پزشکی است. همچنین این موتور میتواند با انواع درایورهای استپر متناسب با جریان و ولتاژ آن، به راحتی راهاندازی شود و به عنوان قطعهای کلیدی در سیستمهای حرکت دقیق عمل کند. در کل، استپر موتور 42BYGH47-401A با ویژگیهای فنی مناسب، دقت بالا و قابلیت اطمینان، گزینهای ایدهآل برای پروژههایی است که نیازمند کنترل موقعیت بدون نیاز به سنسور بازخورد هستند.
ابعاد فریم این استپر موتور پرینتر سه بعدی 42x42 میلیمتر و طول بدنه آن 48 میلیمتر میباشد. این موتور دارای چهار سیم اتصال با رنگهای مشکی (A+)، سبز (A-)، قرمز (B+) و آبی (B-) است که امکان اتصال به درایورهای استاندارد دو فاز را فراهم میکند. استپر موتورهای دو فاز مانند این مدل، به دلیل ساختار الکترومغناطیسی خاص خود، توانایی تولید گشتاور بالا در سرعتهای پایین را دارند و برای کاربردهای صنعتی و دقیق انتخاب مناسبی محسوب میشوند.
کاربرد اصلی این استپر موتور 42BYGH47 در دستگاههای نیازمند کنترل موقعیت دقیق مانند پرینترهای سه بعدی، دستگاههای CNC، رباتیک و تجهیزات پزشکی است. همچنین این موتور میتواند با انواع درایورهای استپر متناسب با جریان و ولتاژ آن، به راحتی راهاندازی شود و به عنوان قطعهای کلیدی در سیستمهای حرکت دقیق عمل کند. در کل، استپر موتور 42BYGH47-401A با ویژگیهای فنی مناسب، دقت بالا و قابلیت اطمینان، گزینهای ایدهآل برای پروژههایی است که نیازمند کنترل موقعیت بدون نیاز به سنسور بازخورد هستند.
کاربرد :
- استفاده در پرینترهای سه بعدی برای حرکت دقیق محورهای مختلف
- بهکارگیری در دستگاههای CNC برای کنترل موقعیت ابزار
- کاربرد در رباتیک برای کنترل حرکت و چرخش دقیق بازوها
مشخصات :
- نوع موتور: استپر موتور دو قطبی (Bipolar)
- زاویه هر پله: 1.8 درجه
- گشتاور نگهدارنده: 55 نیوتنسانتیمتر
- جریان نامی هر فاز: 1.5 آمپر
- ابعاد فریم: 42 × 42 میلیمتر
- طول بدنه موتور: 48 میلیمتر
- قطر شافت: 5 میلیمتر
- نوع شافت: شافت گرد ("D" Shaft)
- تعداد سیمهای خروجی: 4 رشته
- رنگبندی سیمها و اتصالات:
مشکی (A+)
سبز (A-)
قرمز (B+)
آبی (B-)
امکانات :
- کنترل دقیق موقعیت و سرعت بدون نیاز به سنسور فیدبک
- گشتاور بالا برای حرکتهای پایدار و دقیق
- قابلیت راهاندازی با انواع درایورهای استاندارد دو فاز
Description:
A stepper motor, also known as a step motor or stepping motor, is a brushless DC electric motor that divides a full rotation into a number of equal steps. The motor's position can then be commanded to move and hold at one of these steps without any position sensor for feedback (an open-loop controller), as long as the motor is carefully sized to the application with respect to torque and speed.
There are a wide variety of stepper types, some of which require very specialized drivers. For our purposes, we will focus on stepper motors that can be driven with commonly available drivers. These are Permanent Magnet or Hybrid steppers, either 2-phase bipolar or 4-phase unipolar.
Another thing to consider is how the motor will interface with the rest of the drive system. Motors are available with a number of shaft styles Round or "D" Shaft, Geared shaft and Leadscrew Shaft.
The next thing to consider is the positioning resolution you require. The number of steps per revolution ranges from four to 400. Commonly available step counts are 24, 48 and 200.
Resolution is often expressed as degrees per step. A 1.8° motor is the same as a 200 step/revolution motor.
The trade-off for high resolution is speed and torque. High step count motors top-out at lower RPMs than similar size. And the higher step-rates needed to turn these motors results in lower torque than a similar size low-step-count motor at similar speeds.
Another thing to consider is how the motor will interface with the rest of the drive system. Motors are available with a number of shaft styles Round or "D" Shaft, Geared shaft and Leadscrew Shaft.
There are three main types of stepper motors Permanent magnet stepper, Variable reluctance stepper, and Hybrid synchronous stepper.
Features:
Motor:42BYGH47 -401A
Motor Type: Bipolar Stepper
Step Angle: 1.8 deg.
Holding Torque: 55Ncm
Rated Current/phase: 1.5 A
Frame Size: 42 x 42mm
Body Length: 48mm
Shaft Diameter: 5mm
Shaft Type: Round ("D" Shaft)
Number of Leads: 4
Connection: Black(A+), Green(A-), Red(B+), Blue(B-)
A stepper motor, also known as a step motor or stepping motor, is a brushless DC electric motor that divides a full rotation into a number of equal steps. The motor's position can then be commanded to move and hold at one of these steps without any position sensor for feedback (an open-loop controller), as long as the motor is carefully sized to the application with respect to torque and speed.
There are a wide variety of stepper types, some of which require very specialized drivers. For our purposes, we will focus on stepper motors that can be driven with commonly available drivers. These are Permanent Magnet or Hybrid steppers, either 2-phase bipolar or 4-phase unipolar.
Another thing to consider is how the motor will interface with the rest of the drive system. Motors are available with a number of shaft styles Round or "D" Shaft, Geared shaft and Leadscrew Shaft.
The next thing to consider is the positioning resolution you require. The number of steps per revolution ranges from four to 400. Commonly available step counts are 24, 48 and 200.
Resolution is often expressed as degrees per step. A 1.8° motor is the same as a 200 step/revolution motor.
The trade-off for high resolution is speed and torque. High step count motors top-out at lower RPMs than similar size. And the higher step-rates needed to turn these motors results in lower torque than a similar size low-step-count motor at similar speeds.
Another thing to consider is how the motor will interface with the rest of the drive system. Motors are available with a number of shaft styles Round or "D" Shaft, Geared shaft and Leadscrew Shaft.
There are three main types of stepper motors Permanent magnet stepper, Variable reluctance stepper, and Hybrid synchronous stepper.
Features:
Motor:42BYGH47 -401A
Motor Type: Bipolar Stepper
Step Angle: 1.8 deg.
Holding Torque: 55Ncm
Rated Current/phase: 1.5 A
Frame Size: 42 x 42mm
Body Length: 48mm
Shaft Diameter: 5mm
Shaft Type: Round ("D" Shaft)
Number of Leads: 4
Connection: Black(A+), Green(A-), Red(B+), Blue(B-)