


186,450 تومان
در حال حاضر موجود نمی باشد
علاقه مندان : 2 نفر
وضعیت : فعال
تعداد مرجوعی : 0
دنبال کنندگان : 2 نفر
قدمت : 8 سال و 4 ماه و 5 روز
وزن : 1 گرم
کل فروش : 133 عدد
تعداد سفارش ها : 60 سفارش
1 از 5.0 با 1 رای
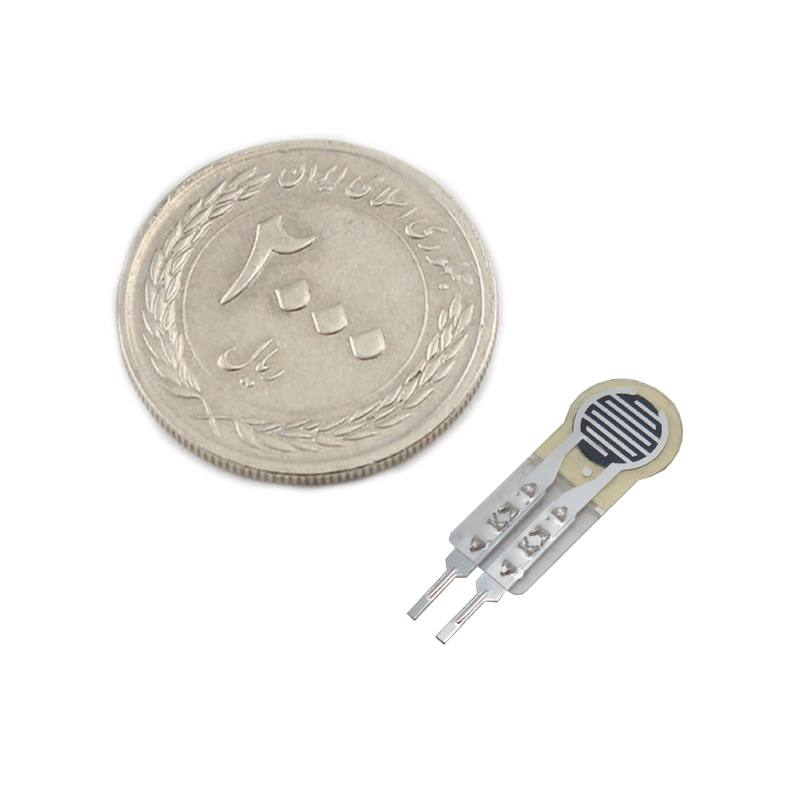
حسگر لمسی حساس به فشار - سنسور پیزو مقاومتی کوچک و کممصرف
سنسور سنجش فشار پیزو مقاومتی انعطافپذیر دارای قطر ۷ میلیمتر یک حسگر پیشرفته و دقیق است که برای اندازهگیری نیرو و فشار در کاربردهای مختلف صنعتی و تحقیقاتی طراحی شده است. این سنسور فشار انعطافپذیر پیزو مقاومتی از یک دیافراگم انعطافپذیر پیزو مقاومتی بهره میبرد که با اعمال فشار، مقاومت الکتریکی آن تغییر کرده و سیگنال قابل پردازشی تولید میکند.
این محصول به عنوان یک سنسور فشار لمسی رباتیک در سیستمهای رباتیک و تشخیص لمس، عملکردی ایدهآل دارد. مدل RP-L نمونهای از این حسگر لمسی حساس به فشار است که قادر به تشخیص طیف گستردهای از فشارها ، از لمس ظریف انگشت تا وزن بدن، میباشد. طراحی انعطافپذیر این سنسور، نصب آن روی سطوح منحنی و نامسطح را ممکن میسازد و آن را به گزینهای مناسب برای تجهیزات پوشیدنی هوشمند، سیستمهای لمسی در رباتیک و فناوریهای پزشکی تبدیل کرده است.
این سنسور، به عنوان یک سنسور فشار دقیق برای رباتیک و پزشکی ، ویژگیهایی همچون دقت و حساسیت بالا، مصرف انرژی کم، پاسخ سریع و دوام بالا را ارائه میدهد. این ویژگیها آن را به انتخابی مناسب برای پروژههای حساس تبدیل کرده است. همچنین، این سنسور پیزومقاومتی کوچک و کم مصرف در بسیاری از کاربردهای صنعتی، از جمله خودکار سازی، سیستمهای مکاترونیکی و ابزارهای پیشرفته تشخیصی مورد استفاده قرار میگیرد.
با توجه به قابلیت های منحصر به فرد سنسور فشار لمسی رباتیک ، از آن میتوان در توسعه فناوریهای نوین مانند رباتیک نرم ، رابطهای انسان-ماشین و دستگاههای پزشکی دقیق بهره برد.
نکته آموزشی:
پوست مصنوعی (Artificial Skin) یک فناوری پیشرفته در حوزه رباتیک، پزشکی و پروتزهای هوشمند است که با هدف شبیهسازی ویژگیهای پوست انسان طراحی شده است. این نوع پوست معمولاً از مواد انعطافپذیر و حسگرهای حساس به فشار، حرارت و لمس ساخته میشود تا عملکردی مشابه پوست طبیعی داشته باشد.
در رباتیک و پروتزهای هوشمند، پوست مصنوعی به رباتها و اندامهای مصنوعی اجازه میدهد که لمس، فشار و حتی دما را حس کنند. این ویژگی در بهبود تعامل آنها با محیط و انسانها بسیار مهم است. همچنین، در پزشکی و درمان زخمها، پوستهای مصنوعی زیستی بهعنوان جایگزینی برای پوست طبیعی در بیماران دارای سوختگیهای شدید یا جراحات عمیق به کار میروند.
رباتیک نرم (Soft Robotics) به طراحی رباتهایی با ساختارهای انعطافپذیر و نرم گفته میشود که از مواد مانند سیلیکون و لاستیک ساخته شدهاند. این رباتها به دلیل تطبیقپذیری بالا و ایمنی بیشتر در کاربردهایی مانند جراحیهای کمتهاجمی، صنعت و تعامل با اشیاء شکننده کاربرد دارند
این محصول به عنوان یک سنسور فشار لمسی رباتیک در سیستمهای رباتیک و تشخیص لمس، عملکردی ایدهآل دارد. مدل RP-L نمونهای از این حسگر لمسی حساس به فشار است که قادر به تشخیص طیف گستردهای از فشارها ، از لمس ظریف انگشت تا وزن بدن، میباشد. طراحی انعطافپذیر این سنسور، نصب آن روی سطوح منحنی و نامسطح را ممکن میسازد و آن را به گزینهای مناسب برای تجهیزات پوشیدنی هوشمند، سیستمهای لمسی در رباتیک و فناوریهای پزشکی تبدیل کرده است.
این سنسور، به عنوان یک سنسور فشار دقیق برای رباتیک و پزشکی ، ویژگیهایی همچون دقت و حساسیت بالا، مصرف انرژی کم، پاسخ سریع و دوام بالا را ارائه میدهد. این ویژگیها آن را به انتخابی مناسب برای پروژههای حساس تبدیل کرده است. همچنین، این سنسور پیزومقاومتی کوچک و کم مصرف در بسیاری از کاربردهای صنعتی، از جمله خودکار سازی، سیستمهای مکاترونیکی و ابزارهای پیشرفته تشخیصی مورد استفاده قرار میگیرد.
با توجه به قابلیت های منحصر به فرد سنسور فشار لمسی رباتیک ، از آن میتوان در توسعه فناوریهای نوین مانند رباتیک نرم ، رابطهای انسان-ماشین و دستگاههای پزشکی دقیق بهره برد.
نکته آموزشی:
پوست مصنوعی (Artificial Skin) یک فناوری پیشرفته در حوزه رباتیک، پزشکی و پروتزهای هوشمند است که با هدف شبیهسازی ویژگیهای پوست انسان طراحی شده است. این نوع پوست معمولاً از مواد انعطافپذیر و حسگرهای حساس به فشار، حرارت و لمس ساخته میشود تا عملکردی مشابه پوست طبیعی داشته باشد.
در رباتیک و پروتزهای هوشمند، پوست مصنوعی به رباتها و اندامهای مصنوعی اجازه میدهد که لمس، فشار و حتی دما را حس کنند. این ویژگی در بهبود تعامل آنها با محیط و انسانها بسیار مهم است. همچنین، در پزشکی و درمان زخمها، پوستهای مصنوعی زیستی بهعنوان جایگزینی برای پوست طبیعی در بیماران دارای سوختگیهای شدید یا جراحات عمیق به کار میروند.
رباتیک نرم (Soft Robotics) به طراحی رباتهایی با ساختارهای انعطافپذیر و نرم گفته میشود که از مواد مانند سیلیکون و لاستیک ساخته شدهاند. این رباتها به دلیل تطبیقپذیری بالا و ایمنی بیشتر در کاربردهایی مانند جراحیهای کمتهاجمی، صنعت و تعامل با اشیاء شکننده کاربرد دارند
کاربرد :
- رباتیک نرم: استفاده در رباتها برای شبیهسازی حس لامسه و تعامل با محیط.
- تجهیزات پزشکی: استفاده در دستگاههای تشخیصی پزشکی برای اندازهگیری فشار و نیرو.
- سیستمهای پوشیدنی هوشمند: استفاده در دستبندها و لباسهای هوشمند برای اندازهگیری فشار و حرارت پوست.
- صفحات تاچ: استفاده در صفحات لمسی دستگاههای الکترونیکی، از جمله تلفنهای هوشمند، تبلتها و سیستمهای کنترل لمسی صنعتی.
مشخصات فنی :
- ضخامت (Thickness): 0.3 میلی متر
- نیروی تحریک (Trigger Force): 30 گرم، سنسور هنگام کاهش مقاومت به 200kΩ فعال میشود.
- شکل (Shape): ورقهای، انعطافپذیر
- محدوده شناسایی (Detection Range): از 30 گرم تا 1.5 کیلوگرم یا بیشتر
- حالت عملکرد فشار (Pressure Mode of Action): استاتیک یا دینامیک (فرکانس در حدود 10 هرتز)
- مقاومت بدون تحریک (No Trigger Resistance): 10 مگا اهم
- زمان فعالسازی (Activation Time): کمتر از 0.01 ثانیه
- دمای کاری (Use Temperature): از -40°C تا +85°C
- دوام (Durability): بیش از 1 میلیون بار
- هیسترزیس (Hysteresis): +10% (RF + -RF -) / FR +، نیرو 1000 گرم
- زمان پاسخدهی (Response Time): 10 میلیثانیه
- تداخل الکترومغناطیسی (Electromagnetic Interference EMI): تولید نمیکند
- تخلیه الکترواستاتیک (Electrostatic Discharge ESD): حساس نیست
- شیب (Drift): 5%، بار 1 کیلوگرم، 24 ساعت
- نوع محصول (Item Type): سنسور فشار فیلمی
- جنس (Material): پلیمر
- اصل کار (Working Principle): سنسور لرزش
- دستهبندی سنسور (Sensor Category): حساس به فشار
امکانات :
- سنسور فشار فیلمی انعطافپذیر و نازک
- مصرف انرژی پایین و پاسخ سریع
- شناسایی نیروهای ضعیف دینامیک و استاتیک
- لایه فیلم انعطافپذیر و لایه حساس به فشار
- محدوده شناسایی فشار: ۳۰ گرم تا ۱.۵ کیلوگرم یا بیشتر
- دقت بالا، پاسخ سریع، عمر طولانی