هنوز هیچ رایی ثبت نشده است
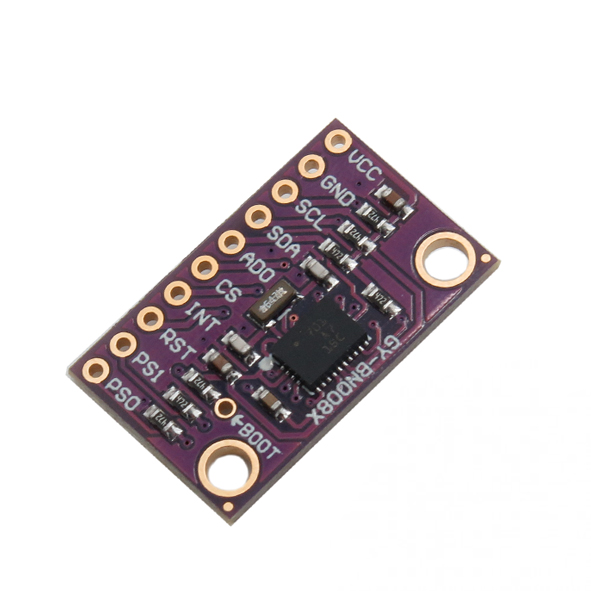
ماژول IMU نه محوره BNOO80
سنسور BNO080 یک پک متشکل از 3 ژیروسکوپ، 3 قطب سنج و 3 شتاب سنج است که از میکروکنترلر 32 بیتی با هسته کورتکس M0 استفاده کرده و با دقت بالا و عملکرد خوب برای توسعه سیستم و ربات های مختلف و کاربردهایی نظیر اینترنت اشیا استفاده می شود.
ماژول 9 محوره BN0080 قابلیت تولید بردارهای چرخشی دارد که در کاربردهای VR به کار گرفته می شود و طوری طراحی شده تا در تلفن های همراه با سیستم عامل اندروید قابل استفاده باشد.
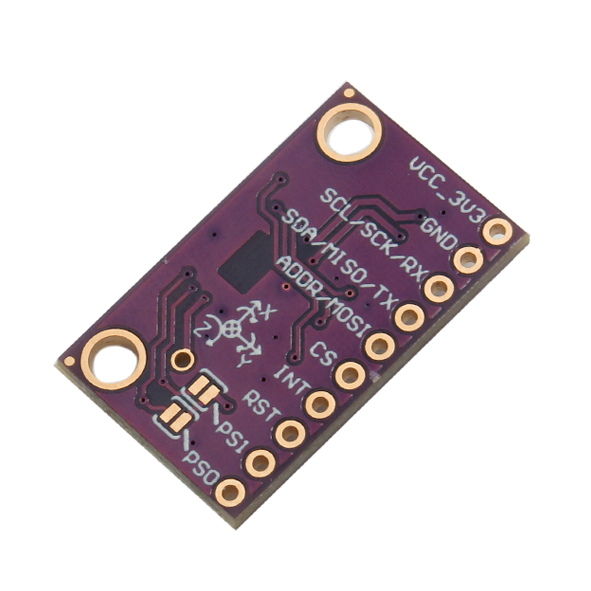
یکی از مهم ترین پارامترهای استفاده از ماژول ها، نوع پروتکل ارتباطی هر ماژول جهت تبادل داده با سایر ماژول ها و میکروکنترلر است. این ماژول 9 محوره IMU می تواند از طریق سه پروتکل I2C، SPI و UART انتقال اطلاعات را انجام دهد.
کاربرد ماژول AHRS نه محوره BN0080:
- ساعت هوشمند
- رباتیک
- اینترنت اشیاء
- کاربردهای VR
مشخصات ماژول AHRS نه محوره BN0080:
- فرکانس I2C: حداکثر 400 کیلوهرتز
- فرکانس SPI: حداکثر 3 مگاهرتز
- نرخ انتقال داده : 115200kbps
- میکروکنترلر 32 بیتی کورتکس M0+
- محدوده 3 شتاب سنج 12 بیتی: ±8g
- محدوده 3 ژیروسکوب 16 بیتی: ±2000 درجه بر ثانیه
- دارای 3 قطب سنج
- بردار چرخشی:
خطای دینامیک: 3.5 درجه
خطای استاتیک: 2 درجه - بردار چرخش گیمینگ:
خطای دینامیک: 2.5 درجه
خطای ستاتیک: 1.5 درجه
مستندات:
دیتاشیت سنسور BNO080
BNO080/085 provides application-specific configuration, function and performance in a small turnkey assembly, benefiting OEMs by shortening time to market, shortening development time and BOM cost, and providing the highest accuracy and quality.
VR IMU uses the impressive BNO080 IMU. The IC has a combination of a three-axis accelerometer/gyro/magnetometer and runs with ARM Cortex M0+ to run powerful algorithms. The BNO080 inertial measurement unit (IMU) can generate accurate rotation vector headings, which is very suitable for VR and other heading applications, with a static rotation error of 2 degrees or less. This is what we have been waiting for: all sensor data is combined and drift corrected into meaningful and accurate IMU information.
This IC is designed to be implemented in Android-based phones to process all the calculations required for virtual reality goggles using only your phone. The sensor function is very powerful, and the power is also very complicated. An I2C-based library is provided, which provides rotation vectors (most people want to read from the IMU) as well as acceleration, gyroscope and magnetometer readings, steps, activity classifiers (such as cycling) and calibration.
VR IMU has created a demo processing application to see how the motion of the IMU uses the quaternion output of the IMU to accurately manipulate 3D objects.
If I2C is not your first communication choice, the sensor can also communicate via SPI and UART! If you are using UART, we recommend that you use Serial Basic to connect easily.
This version uses an onboard 32kHz crystal to improve accuracy and more accurate time stamps.