









3 از 5.0 با 1 رای
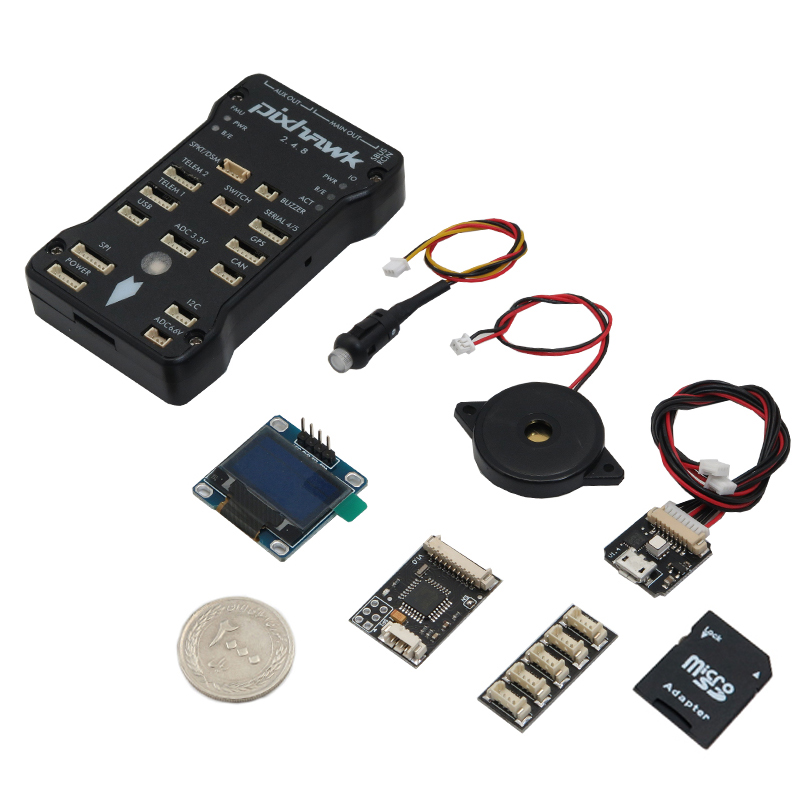
برد اتوپایلوت و فلایت کنترل Pixhawk V2.4.8
کاربرد فلایت کنترلر Pixhawk:
- کنترل و هدایت سیتم های بدون سرنشین
مشخصات فلایت کنترلر Pixhawk:
- پردازنده: کورتکس 32 بیتی M4
- فرکانس اصلی: 256 کیلوهرتزی با رم 168 مگاهرتز
- سنسورژِیروسکوپی 3 محوره دیجیتال 16 بیتی L3GD20
- شتاب سنج 3 محوره 14 بیتی LSM303D
- سنسورمغناطیس سنج 3 محوره 14 بیتی MPU6000
- فشار سنج دقت بالا MS5611
- 5 پورت ارتباطی UART
- 2 درگاه ارتباطی CAN
- یرنده ماهواره ای Spektrum DSM/DSM2/DSM-X
- پورت ارتباطی I2C و SPI
- دارای 14 پورت خروجی PWM
مستندات:
ساخت هواپیمای بدون سرنشین با Pixhawk2.4.8
Description:
Pixhawk is an advanced
autopilot system designed by the PX4 open-hardware project and
manufactured by 3D Robotics. It features advanced processor and sensor
technology from ST Microelectronics® and a NuttX real-time operating
system, delivering incredible performance, flexibility, and reliability
for controlling any autonomous vehicle. Pixhawk intergrated the newest
32 bit chip technology and sensor technology, get rid of the dilemma of
having only 8 bit CPU of APM, and CPU occupancy being too high.
The
benefits of the Pixhawk system include integrated multithreading, a
Unix/Linux-like programming environment, completely new autopilot
functions such as Lua scripting of missions and flight behavior, and a
custom PX4 driver layer ensuring tight timing across all processes.
These advanced capabilities ensure that there are no limitations to
your autonomous vehicle. Pixhawk allows existing APM and PX4 operators
to seamlessly transition to this system and lowers the barriers to
entry for new users to participate in the exciting world of autonomous
vehicles.
Features:
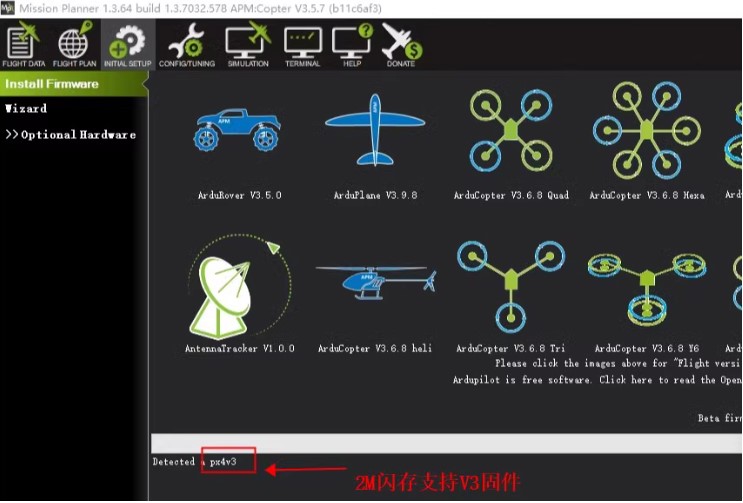
Processor:
32 bit 2M flash memory STM32F427 Cortex M4, with hardware floating point processing unit
Main frequency: 256K, 168MHZ RAM
Sensor:
L3GD20 3 axis digital 16 bit gyroscope
LSM303D 3 axis 14 bit accelerometer /magnetometer
MPU6000 6 axis accelerometer / magnetometer
MS5611 high precision barometer
Interface:
5* UART, 1*compatible high voltage, 2*hardware flow control
2*CAN
Spektrum DSM/DSM2/DSM-X satellite receiver compatible input
Futaba SBUS compatible input and output
PPM signal input
RSSI (PWM or voltage) input
I2C
SPI
3.3 and 6.6VADC input
External USB MICRO interface
14 PWM/ Servo Output
Real time operation system