

270,520 تومان
در حال حاضر موجود نمی باشد
علاقه مندان : -
وضعیت : فعال
تعداد مرجوعی : 0
دنبال کنندگان : -
قدمت : 7 سال و 5 ماه و 9 روز
وزن : 4 گرم
کل فروش : 24 عدد
تعداد سفارش ها : 21 سفارش
هنوز هیچ رایی ثبت نشده است
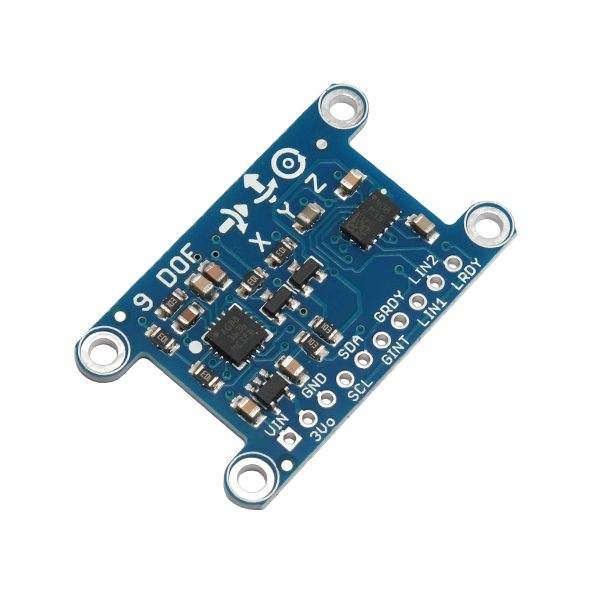
ماژول IMU نه محوره L3GD20 و LSM303D با ارتباط SPI
ماژول ژیروسکوپ نه محوره LSM303D و L3GD20 از دو سنسور LSM303D و سنسور LSGD20 تشکیل شده است و به صورت 9 محوره متشکل از مغناطیس سنج، فشار سنج و ژیروسکوپ می باشد و از طریق اینترفیس I2C به راحتی با سایر ماژول ها و میکروکنترلرها تبادل داده انجام می دهد.
بر روی این ماژول رگولاتور 3 ولتی قرار دارد و در برابر اتصال ولتاژ معکوس محافظت شده است.
کاربرد ماژول IMU l3gd20 lsm303d:
- کوادکوپتر
- هواپیمای بدون سرنشین
- رباتیک و ساخت سرگرمی
مشخصات IMU l3gd20 lsm303d:
- ولتاژ تغذیه: 3 تا 5 ولت
- اینترفیس: I2C
- ژیروسکوپ 16 بیتی
- مغناطیس متر 16 بیتی
- بارومتر 24 بیتی
- محدوده فشار: 300hPa~ 1110hPa
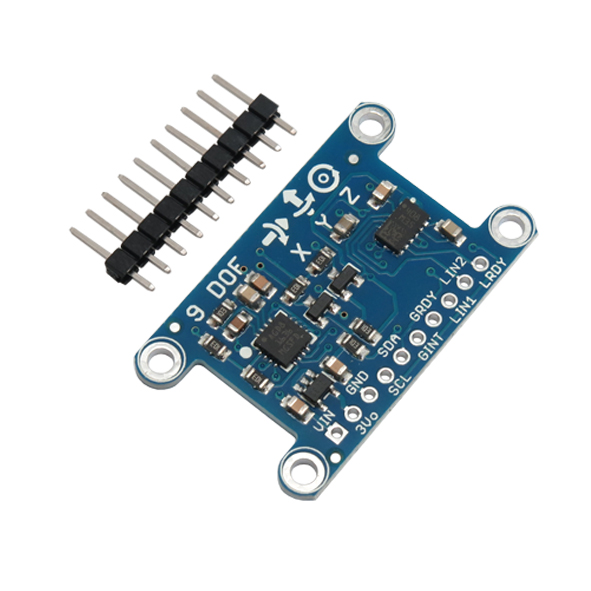
- استاندارد پین: 2.54mm
- اندازه: 38 در 23 میلی متر
مستندات:
ماژول نه محوره L3GD20 و LSM303D
دیتاشیت سنسور LSM303D
دیتاشیت سنسور LSGD20
Description:
This inertial-measurement-unit combines 2 of the best quality sensors available on the market to give you 9 axes of data: 3 axes of accelerometer data, 3 axes gyroscopic, and 3 axes magnetic (compass).
The L3DG20H gyroscope + LSM303DLHC accelerometer/compass sensors are all on one breakout here, to save you space and money. Since all of them use I2C, you can communicate with all of them using only two wires. Most customers will be pretty happy with just the plain I2C interfacing, but we also break out the 'data ready' and 'interrupt' pins, so advanced users can interface with if they choose. A 3V regulator with reverse-polarity protection means you don't have to worry about frying the boards by accident. There's level shifting circuitry so the IMU can be used with 3 or 5V logic boards.
Application:
Drones
Quadcuopter
Robotics
Drones
Quadcuopter
Robotics
Features:
Output format (I2C/SPI):
Output format (I2C/SPI):
Gyroscope: one 16-bit reading per axis
Accelerometer: one 16-bit reading per axis
Magnetometer: one 16-bit reading per axis
Barometer: 24-bit pressure reading (I2C only)
Sensitivity range:
Gyro: ±245, ±500, or ±2000°/s
Accelerometer: ±2, ±4, ±6, ±8, or ±16g
Magnetometer: ±2, ±4, ±8, or ±12 gauss
Barometer: 300hPato 1110hPa